




Ҳамгироии камера ва LiDAR барои муайянкунии дақиқ
Ба наздикӣ, як гурӯҳи илмии Ҷопон як асари беназиреро таҳия кардааст.камераи LiDARсенсори омехта, ки аввалин LiDAR дар ҷаҳон аст, ки меҳварҳои оптикии камера ва LiDAR-ро ба як сенсор мутобиқ мекунад. Ин тарҳи беназир имкон медиҳад, ки маълумоти рӯйпӯши бепараллакс дар вақти воқеӣ ҷамъоварӣ карда шавад. Зичии нурпошии лазерии он нисбат ба ҳама сенсорҳои радарии лазерӣ дар ҷаҳон баландтар аст, ки имкон медиҳад, ки объектҳо дар масофаи дур ва дақиқ муайян карда шаванд.
Одатан, LiDAR дар якҷоягӣ бо камераҳо барои муайян кардани дақиқтари объектҳо истифода мешавад, аммо дар маълумоти аз ҷониби воҳидҳои гуногун бадастомада фарқият вуҷуд дорад, ки боиси таъхир дар калибрченкунӣ байни сенсорҳо мегардад. Сенсори нави омехта камера ва LiDAR-и баландсифатро дар як воҳид муттаҳид мекунад ва ба ҳамгироии маълумоти вақти воқеӣ бидуни параллакс ноил мегардад ва натиҷаҳои самаранок ва дақиқро таъмин мекунад.
Ҳамгироии камера ва LiDAR ба шинохти дақиқи объект ноил мегардад. Гурӯҳ аз технологияи беназири тарроҳии оптикӣ барои муттаҳид кардани камера ва LiDAR ба як воҳиди дорои меҳвари оптикии ҳамоҳангшуда истифода мебарад, ки имкон медиҳад, ки маълумоти тасвири камера ва маълумоти масофаи LiDAR дар вақти воқеӣ ҳамгироӣ карда шавад ва ба пешрафтатарин шинохти объект то имрӯз ноил гардад.радари лазерӣбо қарори ултрабаланд дар якҷоягӣ бо баландтарин зичии партоби лазерӣ дар ҷаҳон, сенсори омехта зичии нури лазерии партобиро афзоиш додааст, ки метавонад монеаҳои хурдро дар масофаҳои дур муайян кунад ва бо ин васила қарор ва дақиқиро беҳтар созад. Сенсори инноватсионии ӯ зичии радиатсияи 0.045 дараҷа дорад ва аз технологияи воҳиди сканкунии лазерии хусусӣ аз принтерҳои бисёрфунксионалӣ (MFP) ва принтерҳо барои муайян кардани ашёи то 30 сантиметр дар масофаи 100 метр истифода мебарад.
Устувории баланд ва радари лазерии оинаи MEMS барои нурпошӣ ба оинаҳо ё муҳаррикҳои MEMS ниёз дорад.лазерба минтақаи васеъ ва зичии баланд. Аммо, қарори оинаҳои MEMS одатан паст аст ва муҳаррик аксар вақт зуд фарсуда мешавад. Ин сенсори нави ҳамгирошуда нисбат ба системаҳои моторӣ қарори баландтар ва нисбат ба оинаҳои анъанавии MEMS устувории бештарро таъмин мекунад. Олимон аз истеҳсолоти пешрафта, технологияи бастабандии сафолӣ ва технологияи сканкунии лазерии баландсифат барои таҳияи оинаҳои хусусии MEMS барои дастгирии сенсории дақиқи баланд дар соҳаҳои гуногун, аз қабили мошинҳои худгард, киштиҳо, мошинҳои вазнин ва ғайра истифода мебаранд.
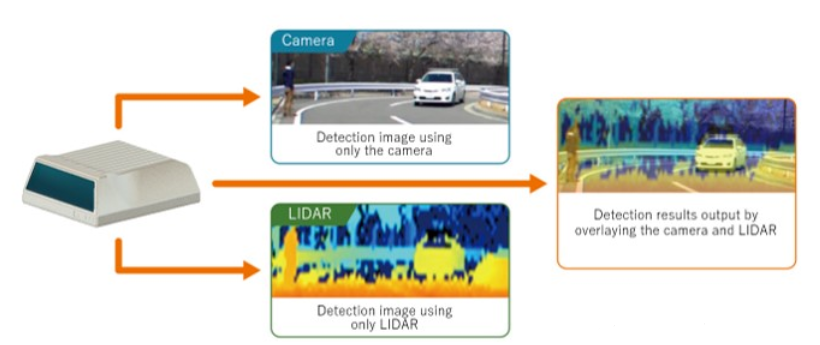
РАСМИ 1: Тасвир аз ҷониби сенсори LiDAR-и камера ошкор карда шуд
Вақти нашр: 10 феврали соли 2025