




Омӯзедлазерусулҳои ҳамоҳангсозӣ
Таъмини ҳамоҳангсозии нури лазер вазифаи асосии раванди ҳамоҳангсозӣ мебошад. Ин метавонад истифодаи оптикаи иловагӣ, ба монанди линзаҳо ё коллиматорҳои нахӣ, махсусан барои диодҳо ёманбаъҳои лазерии нахӣПеш аз танзими лазер, шумо бояд бо қоидаҳои бехатарии лазер ошно бошед ва боварӣ ҳосил кунед, ки шумо бо айнакҳои бехатарӣ, ки барои бастани дарозии мавҷҳои лазер мувофиқанд, муҷаҳҳаз ҳастед. Илова бар ин, барои лазерҳои ноаён, барои мусоидат ба кӯшишҳои танзим кортҳои ошкоркунӣ лозим шуда метавонанд.
Дарҳамоҳангсозии лазерӣ, Кунҷ ва мавқеи шуоъ бояд ҳамзамон назорат карда шаванд. Ин метавонад истифодаи оптикаҳои сершуморро талаб кунад, ба Танзимоти ҳамоҳангсозӣ мураккабӣ зам кунад ва метавонад фазои зиёди мизи кориро ишғол кунад. Аммо, бо васлкунии кинематикӣ, ҳалли оддӣ ва муассирро, махсусан барои барномаҳои маҳдуди фазо, қабул кардан мумкин аст.
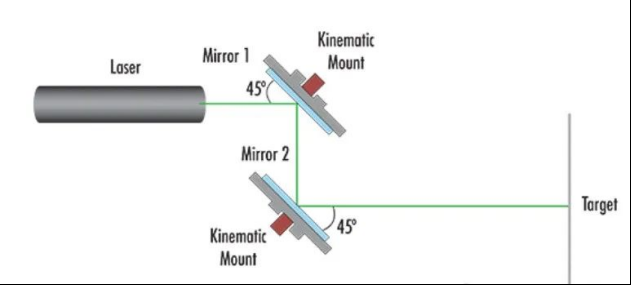
Расми 1: Сохтори параллелӣ (қабати Z)
Расми 1 сохтори асосии сохтори Z-Fold-ро нишон медиҳад ва сабаби номро нишон медиҳад. Ду оина, ки дар ду васлкунаки кинематикӣ насб карда шудаанд, барои ҷойивазкунии кунҷӣ истифода мешаванд ва тавре ҷойгир карда шудаанд, ки нури афтанда ба сатҳи оинаи ҳар як оина дар як кунҷ бархӯрад. Барои содда кардани танзим, ду оинаро тақрибан дар кунҷи 45° ҷойгир кунед. Дар ин танзим, такягоҳи кинематикии аввал барои ба даст овардани мавқеи амудӣ ва уфуқии дилхоҳи нур истифода мешавад, дар ҳоле ки такягоҳи дуюм барои ҷуброни кунҷ истифода мешавад. Сохтори Z-Fold усули бартарии ҳадафгирии нурҳои сершумори лазер ба як ҳадаф мебошад. Ҳангоми якҷоя кардани лазерҳо бо дарозии мавҷҳои гуногун, як ё якчанд оинаро бо филтрҳои дихроикӣ иваз кардан лозим аст.
Барои кам кардани такроршавӣ дар раванди ҳамоҳангсозӣ, лазерро дар ду нуқтаи алоҳидаи истинод ҳамоҳанг кардан мумкин аст. Хати оддии салиб ё корти сафеди бо X қайдшуда асбобҳои хеле муфид мебошанд. Аввалан, нуқтаи аввали истинодро дар рӯи оинаи 2 ё дар наздикии он, то ҳадди имкон ба ҳадаф наздиктар гузоред. Нуқтаи дуюми истинод худи ҳадаф аст. Аз аввалин стенди кинематикӣ истифода баред, то мавқеъҳои уфуқӣ (X) ва амудии (Y) шуоъро дар нуқтаи ибтидоии истинод танзим кунед, то он бо мавқеи дилхоҳи ҳадаф мувофиқат кунад. Пас аз расидан ба ин мавқеъ, барои танзими кунҷии фосилаи кинематикӣ, ки нури лазерро ба ҳадафи воқеӣ равона мекунад, кронштейни кинематикӣ дуюм истифода мешавад. Оинаи аввал барои тақриби ҳамоҳангсозии дилхоҳ истифода мешавад, дар ҳоле ки оинаи дуюм барои дақиқ танзим кардани ҳамоҳангсозии нуқтаи дуюми истинод ё ҳадаф истифода мешавад.
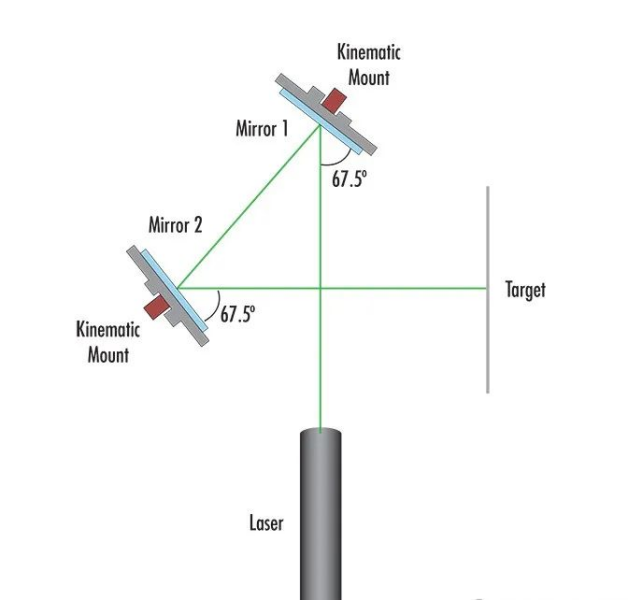
расми 2: Сохтори амудӣ (Расми 4)
Сохтори figure-4 нисбат ба Z-Fold мураккабтар аст, аммо метавонад сохтори системаро фишурдатар таъмин кунад. Монанди сохтори Z-Fold, сохтори figure-4 аз ду оинае истифода мебарад, ки дар кронштейнҳои ҳаракаткунанда насб карда шудаанд. Аммо, бар хилофи сохтори Z-Fold, оина бо кунҷи 67.5° насб карда шудааст, ки бо нури лазер шакли "4"-ро ташкил медиҳад (Расми 2). Ин насб имкон медиҳад, ки инъикоскунандаи 2 аз роҳи нури лазер дуртар ҷойгир карда шавад. Мисли конфигуратсияи Z-Fold,нури лазерӣбояд дар ду нуқтаи истинод, нуқтаи аввали истинод дар оинаи 2 ва нуқтаи дуюм дар ҳадаф ҷойгир карда шавад. Аввалин кронштейни кинематикӣ барои интиқол додани нуқтаи лазер ба мавқеи дилхоҳи XY дар сатҳи оинаи дуюм истифода мешавад. Сипас, кронштейни кинематикии дуюм бояд барои ҷуброни ҷойивазкунии кунҷӣ ва танзими дақиқ дар ҳадаф истифода шавад.
Новобаста аз он ки кадоме аз ин ду конфигуратсия истифода мешавад, риояи тартиби дар боло зикршуда бояд шумораи такрорҳои лозимиро барои ноил шудан ба натиҷаи дилхоҳ ба ҳадди ақал расонад. Бо асбобҳо ва таҷҳизоти дуруст ва чанд маслиҳати оддӣ, ҳамоҳангсозии лазерро хеле содда кардан мумкин аст.
Вақти нашр: 11 марти соли 2024